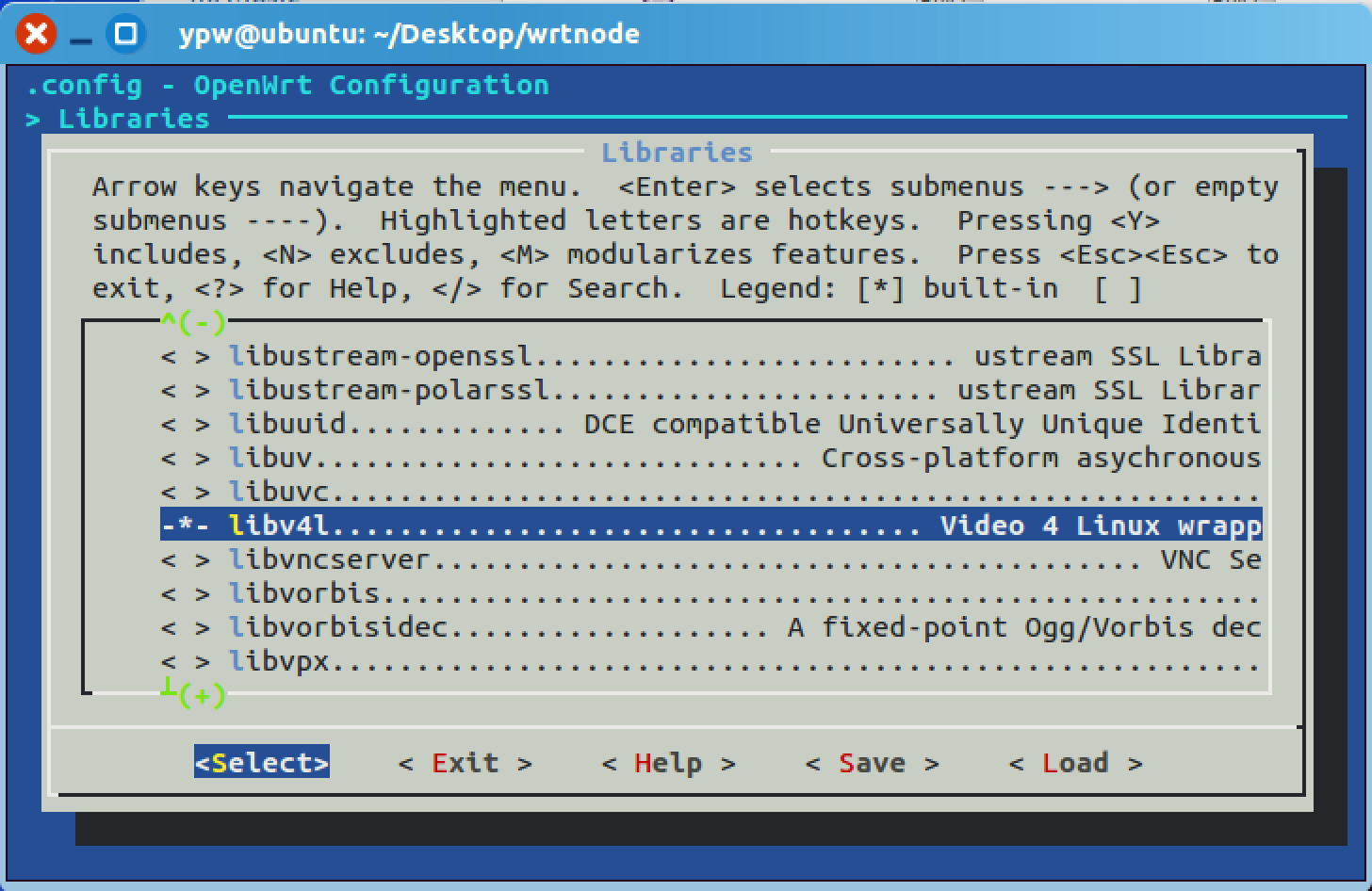
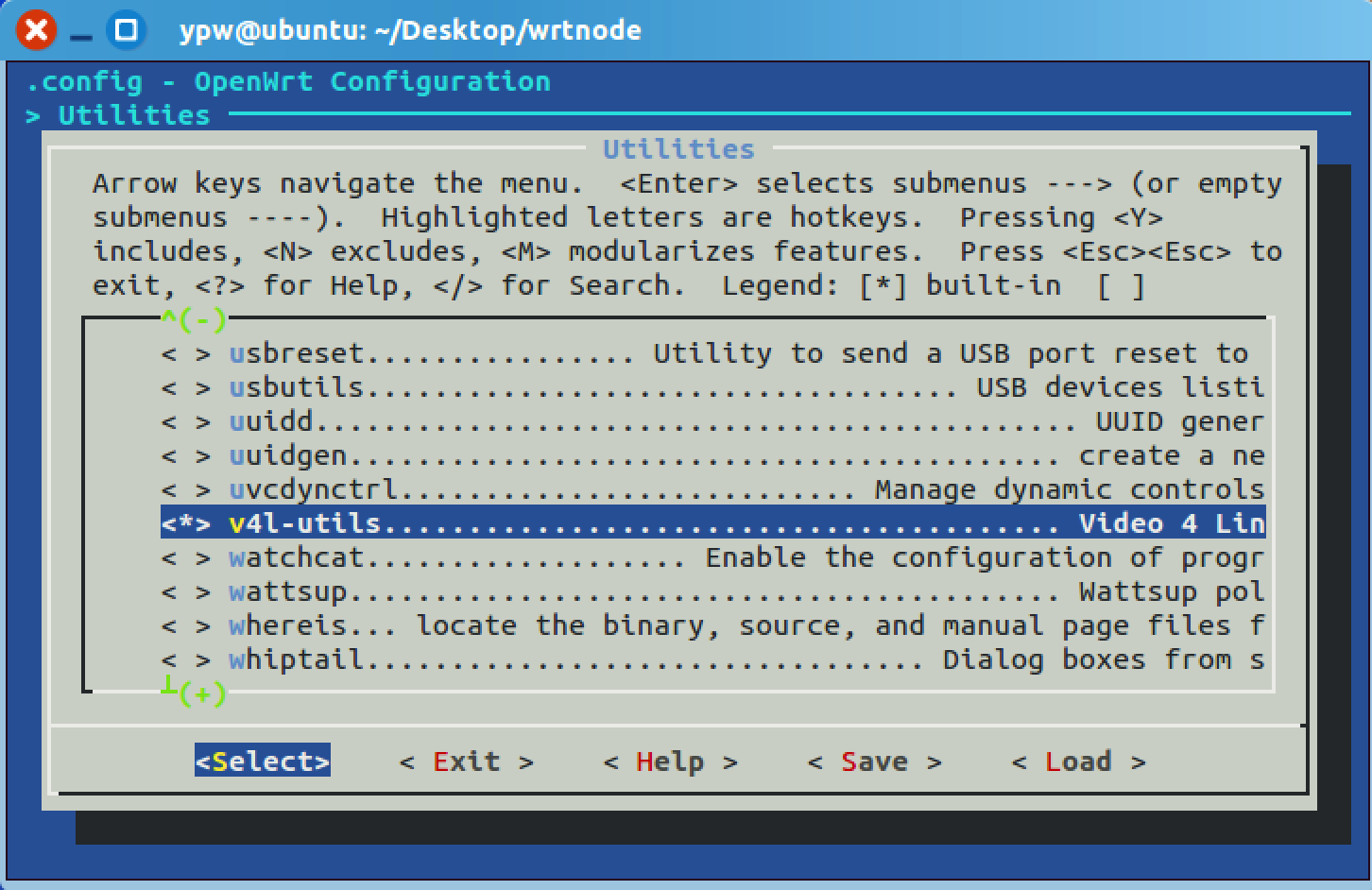
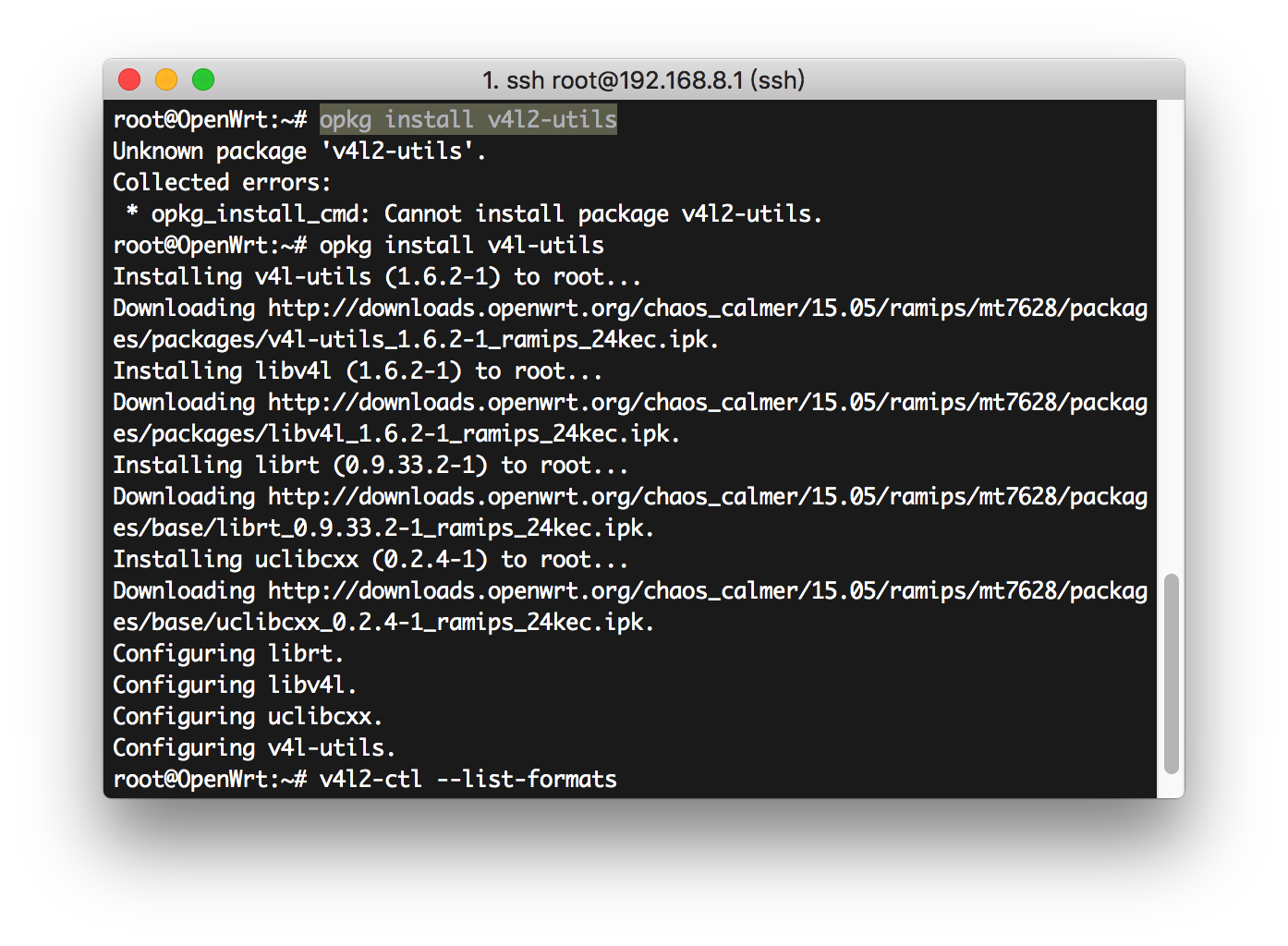
首先安装v4l-utils。 > libv4l is a collection of libraries which
adds a thin abstraction layer on top of video4linux2 devices. The
purpose of this (thin) layer is to make it easy for application writers
to support a wide variety of devices without having to write separate
code for different devices in the same class. libv4l consists of 3
different libraries: libv4lconvert, libv4l1 and libv4l2. libv4l1 offers
the (deprecated) v4l1 API on top of v4l2 devices, independent of the
drivers for those devices supporting v4l1 compatibility (which many v4l2
drivers do not). libv4l2 offers the v4l2 API on top of v4l2 devices,
while adding for the application transparent libv4lconvert conversion
where necessary. This package contains the video4linux utilities.
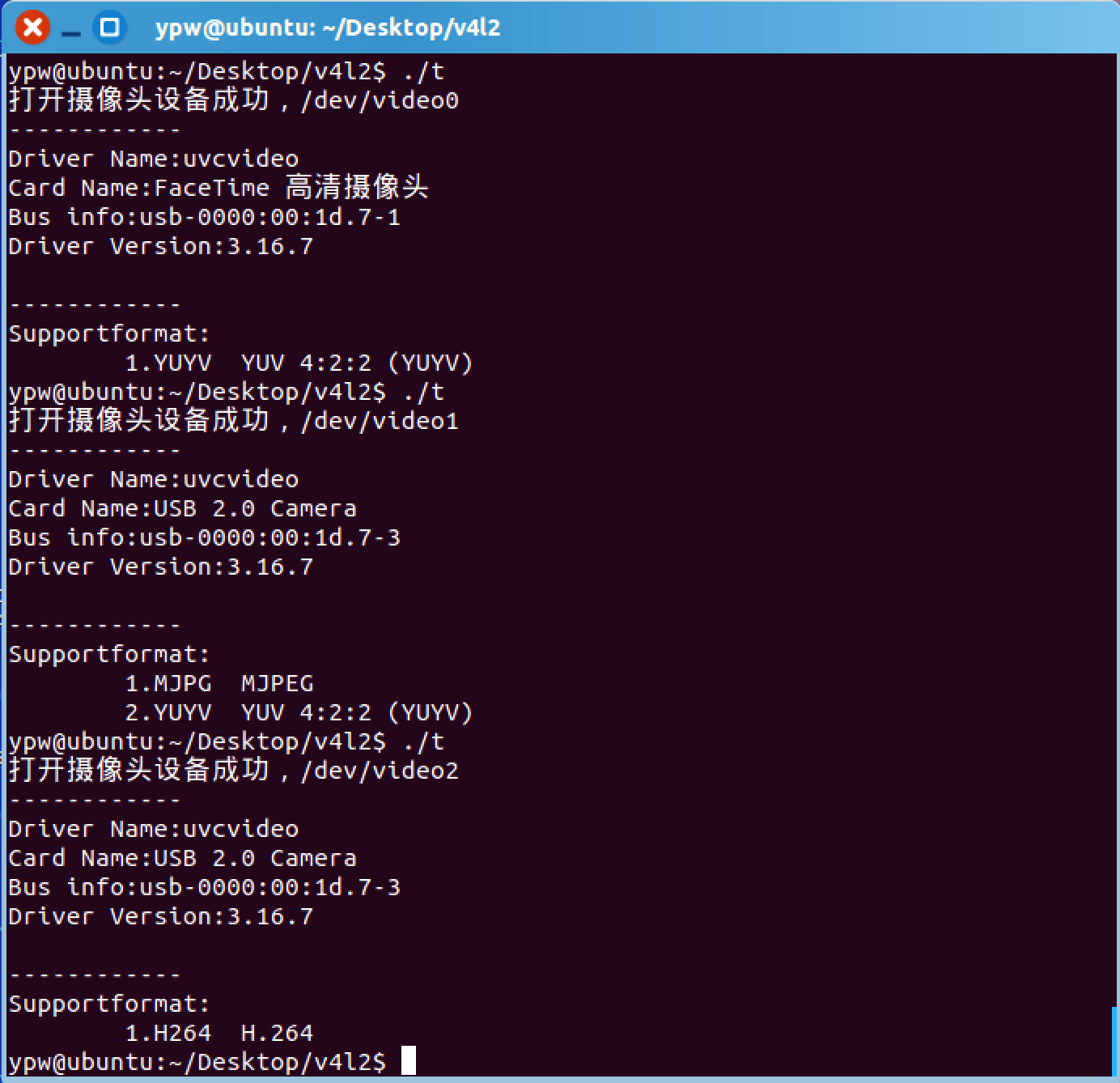
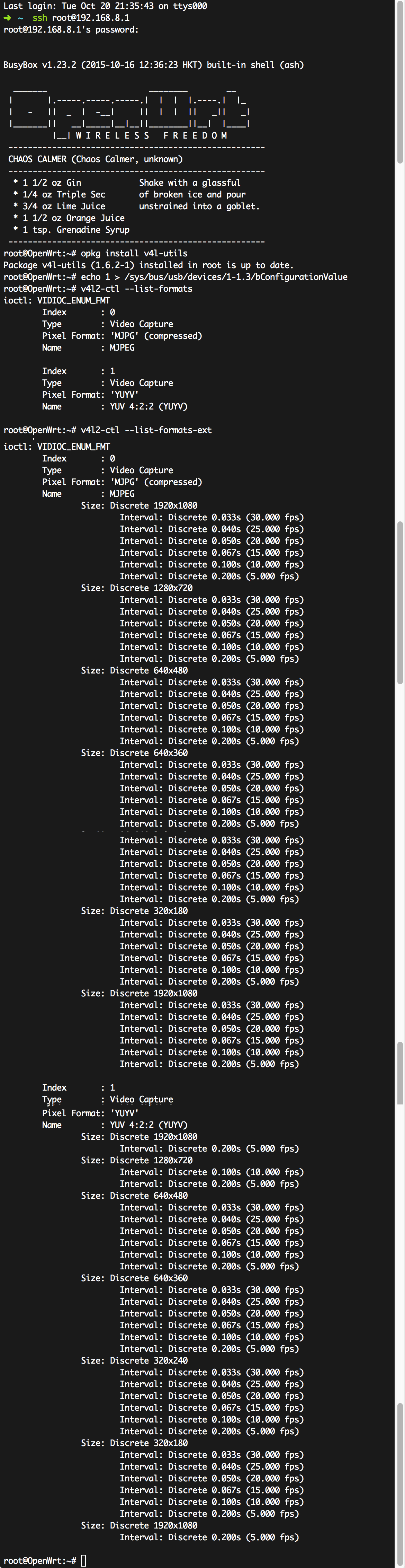
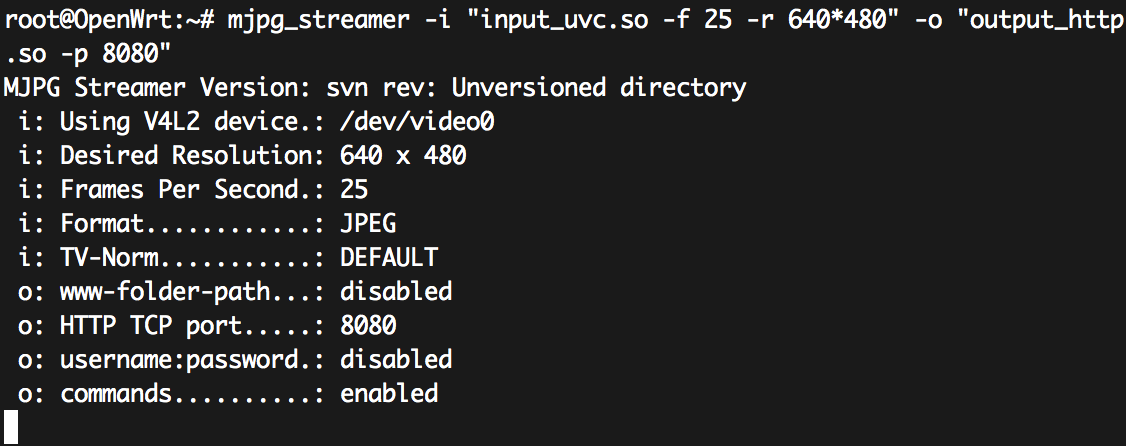
方法1: